Hi, What is the difference between P_TRING and |P| ladder instruction. and why I should affect a tag below the two instructions? Thanks for replies
1
0
Please briefly explain why you feel this question should be reported.
Please briefly explain why you feel this answer should be reported.
Please briefly explain why you feel this user should be reported.
Hi, What is the difference between P_TRING and |P| ladder instruction. and why I should affect a tag below the two instructions? Thanks for replies

Hello, Sometimes, my cpu 1515f-2pn goes to “STOP” and I have this message in th log “Data corruption prior to sending to F-IO” The project is developped in Tia portal V16. Event ID : 16#0D:75D6 Thanks for help!
Hi, The safety program put your cpu to STOP. The data used to calculate your outputs in the safety program changed between start and end of your safety program (OB123). Please check this siemens guide: https://support.industry.siemens.com/cs/document/22099875/simatic-industrial-software-s7-distributRead more
Hi,
The safety program put your cpu to STOP.
The data used to calculate your outputs in the safety program changed between start and end of your safety program (OB123).
Please check this siemens guide:
In your error log I can see that the issue is with your %Q430.0 output.
Please check the network where your %Q430.0 output is writen. maybe the data (inputs and other data) used to calculate this output are changed in other tasks.
Best regards
See less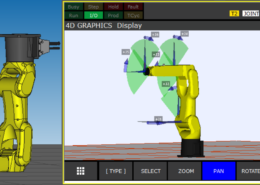
Hello, Is it possible to change to orientation of an inverted mounting robot. I need to see the robot using 4D graphics in the TeachPendant exactly as it phisically mountend. It’s really helpful to easilly jog the robot. Thank you for your help

Hi, Go to SYSTEM => SYSTEM Variables => CELL_GRP => CELL_GRP_T : you can change the values of XYZ WPR to adjust the mounting in the 4D graphics. It only adjust the view. but please, if you have a inverted mounted robot, You must controlled start => maintenace “mount angle setting” you haRead more
Hi,
Go to SYSTEM => SYSTEM Variables => CELL_GRP => CELL_GRP_T :
you can change the values of XYZ WPR to adjust the mounting in the 4D graphics. It only adjust the view.
but please, if you have a inverted mounted robot, You must controlled start => maintenace
“mount angle setting” you have to choose 180 (Upside down)
Have a nice day
See lessHi, I use a s7-1516f-3 pn/dp cpu and I have one faulty F-DI module with this error: Safety program F-IO channel passivated The diagnostic of the module I have this explanation: Substitute values are used for one or more input/output channels of an F-I/O. Check the diagnostics information of the F-I/O for channel errors (such as wire break, short-circuit, discrepancy error) or F-I/O errors. User ...Read more
Hi Maesa & Yuwaris, Sorry for the late reply. the problem is solved. it was due to discrepancy fault. With best regards
Hi Maesa & Yuwaris,
Sorry for the late reply. the problem is solved.
it was due to discrepancy fault.
With best regards
See less
Hi, use P_TRIG to monitior everything in the left of this instruction. It turns to ON for one scan when the entire set of logic to the left goes from off to on use -|P| to monitor a single tag. it turns on one scan when the tag goes from off to on. Best regards
Hi,
use P_TRIG to monitior everything in the left of this instruction. It turns to ON for one scan when the entire set of logic to the left goes from off to on
use -|P| to monitor a single tag. it turns on one scan when the tag goes from off to on.
Best regards
See less