Hello, Is it possible to change to orientation of an inverted mounting robot. I need to see the robot using 4D graphics in the TeachPendant exactly as it phisically mountend. It’s really helpful to easilly jog the robot. Thank you for your help
Please briefly explain why you feel this question should be reported.
Please briefly explain why you feel this answer should be reported.
Please briefly explain why you feel this user should be reported.
Hello, Is it possible to change to orientation of an inverted mounting robot. I need to see the robot using 4D graphics in the TeachPendant exactly as it phisically mountend. It’s really helpful to easilly jog the robot. Thank you for your help
Please login to vote and see the results.

Hi, I am a plc programmer and I want to learn industrial robots programming. Please tell me which robot I start to learn first. thanks

Hello, I am not familiar with fanuc robot. I am trying to run a program from background logic. I have a R30iB Fanuc Controller with an RSR001 which run continuously. In the program WAITDI, an instruction to wait the state of DI[10]. If its ON, I want to call a program to put the robot to a home position tought in the ...Read more
You can't use a wait instruction in a routine called in background logic You can't call a program in a background logic. what are you trying to acheive exactly? Please explain what's the goal of your application
You can’t use a wait instruction in a routine called in background logic
You can’t call a program in a background logic. what are you trying to acheive exactly?
Please explain what’s the goal of your application
See lessHello, Is there a solution to check if fanuc robot is in motion? I want to share this inormation with PLC. thanks for help.
Hi, In system variables you can find this variable: $MOR_GRP[1].$ROB_MOVE To share the state of robot is moving you can use a an output in a routine executed in a background logic. For example : DO[100] = $MOR_GRP[1].$ROB_MOVE Run this program in background logic: The output DO[100] will be updatedRead more
Hi,
In system variables you can find this variable:
$MOR_GRP[1].$ROB_MOVE
To share the state of robot is moving you can use a an output in a routine executed in a background logic.
For example :
DO[100] = $MOR_GRP[1].$ROB_MOVE
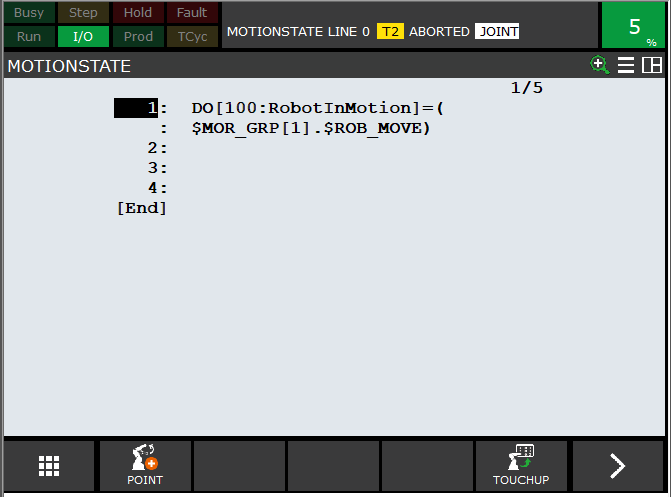
Run this program in background logic:
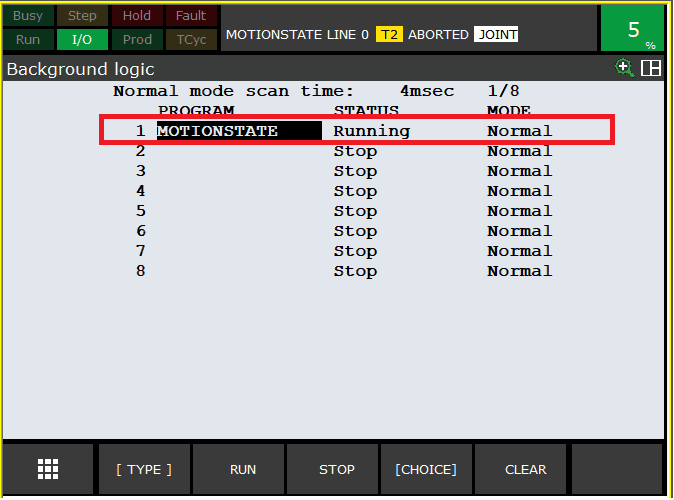
The output DO[100] will be updated and will get the robot motion status.
I hope this help you.
See less
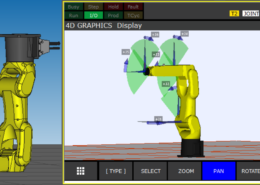
Hi, Go to SYSTEM => SYSTEM Variables => CELL_GRP => CELL_GRP_T : you can change the values of XYZ WPR to adjust the mounting in the 4D graphics. It only adjust the view. but please, if you have a inverted mounted robot, You must controlled start => maintenace “mount angle setting” you haRead more
Hi,
Go to SYSTEM => SYSTEM Variables => CELL_GRP => CELL_GRP_T :
you can change the values of XYZ WPR to adjust the mounting in the 4D graphics. It only adjust the view.
but please, if you have a inverted mounted robot, You must controlled start => maintenace
“mount angle setting” you have to choose 180 (Upside down)
Have a nice day
See less